
dijstra
TreesCat简介
- Dijkstra 算法常用于求无负权边图中的最短路,在优化后有比 Bellman-Ford 算法优秀很多的时间复杂度,实际做题过程中有着更多的应用。
Dijkstra
简介
- 再进行具体讲解之前,我们先定义以下记号:
- G = <V, E> 代表我们要处理的简单有向图;
- n = |V|, m = |E| 代表定点数和边数;
- l(u, v) 代表 u 到 v 的边的长度(边权);
- S 代表起点,E代表终点(如果有的话)
- dist(u) 代表我们当前求出的从S到u的最短路径的长度,后面称为u的距离;
操作
- 我们要维护一个顶点集合 C,满足对于所有集合 C 中的顶点 x,我们都已经找到了起点 S到x的最短路,此时 dist(x)记录的就是最终最短路的长度。
- Dijkstra 算法流程如下:
- 将 C 设置为空,将S的距离设置为 0,其余点的距离设置为无穷大;
- 在每一轮中,将离起点最近的(dist最小,不能是无穷大)的还不在C中的顶点加入C,并且用这个点连出去的边通过松弛操作尝试更新其它点的 dist;
- 当 T(如果 T 存在的话)或者没有新的点加入 C 时,算法结束。
- 由于图上不存在负权边,可以证明每次加入 C 的点都已经找到了从起点到它的最短路。
具体实施
对此图进行Dijkstra;
初始时将 C 设置为空,将S的距离设置为 0,其余点的距离设置为无穷大。
在每一轮中,将离起点最近的(dist最小,不能是无穷大)的还不在C中的顶点加入C,并且用这个点连出去的边通过松弛操作尝试更新其它点的 dist。
| 顶点编号 | 距离 |
|---|---|
| S | 0 |
| A | ∞ |
| B | ∞ |
| C | ∞ |
| D | ∞ |
| E | ∞ |
- 迭代结果

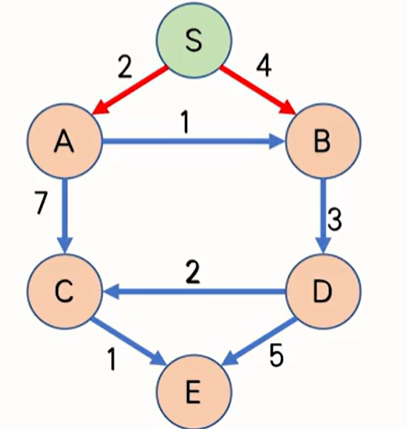
| 顶点编号 | 距离 | 原因 |
|---|---|---|
| S | 0 | 0 |
| A | 2 | l(S, A) |
| B | 3 | dist(C) + l(C, B) |
| C | 8 | dist(A) + l(A, C) |
| D | 6 | dist(E) + l(E, D) |
| E | 9 | l(S, E) |
代码实现
- 将 C 设置为空,将S的距离设置为 0,其余点的距离设置为无穷大;
- 在每一轮中,将离起点最近的(dist最小,不能是无穷大)的还不在C中的顶点加入C,并且用这个点连出去的边通过松弛操作尝试更新其它点的 dist;
- 当 T(如果 T 存在的话)或者没有新的点加入 C 时,算法结束。
- 时间复杂度 O(n²+m)。
1 | struct Node { |
算法演示
- 让我们在另一张图上在演示一遍 Dijkstra 算法。
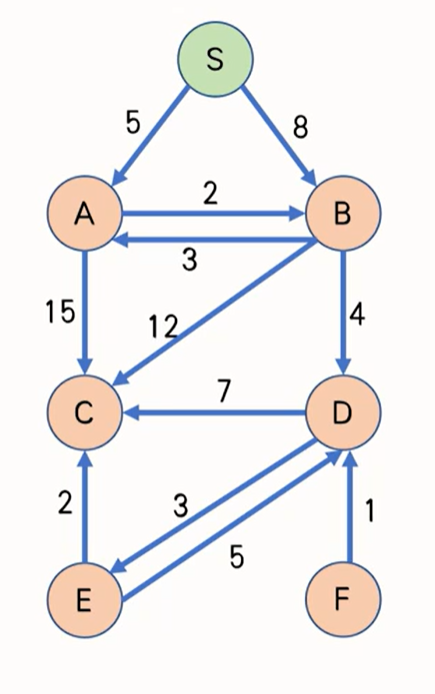
| 当前节点 | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| S | 5 | 8 | ∞ | ∞ | ∞ | ∞ |
| A | 5 | 7 | 20 | ∞ | ∞ | ∞ |
| B | 5 | 7 | 19 | 11 | ∞ | ∞ |
| C | 5 | 7 | 18 | 11 | 14 | ∞ |
| D | 5 | 7 | 16 | 11 | 14 | ∞ |
| E | 5 | 7 | 16 | 11 | 14 | ∞ |
| F |
算法优化
- 观察前面的代码,发现我们花费了大量时间在找出 dist 的最小值上。
- 我们可以采用一个堆(优先队列)来维护 dist 数组,算法时间复杂度可以提升至 O((n+m)log n)。
- 在这里我们使用 set。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28struct Node {
int y, v;
Node(int _y, int _v) { y = _y; v = _v;};
};
set< pair<int, int> > q; // 记录所有还不在集合C里面的点的信息(dist和下标)
vector<Node> edges[1001];
int n, m, dist[1001];
int Dijkstra(int s, int e) {
memset(dist, 127, sizeof(dist));
dist[s] = 0; q.clear();
for (int i = 1; i <= n; i++)
q.insert(make_pair(dist[i], i));
for (; !q.empty();) {
int x = q.begin()->second;
q.erase(q.begin());
if (x == e || dist[x] > 1 << 30)
break;
for (auto i : edges[x])
if (dist[x] + i.v < dist[i.y]) { // 对q里面的i.y更新
q.erase(make_pair(dist[i.y], i.y)); // 删除原本
dist[i.y] = dist[x] + i.v; // 更新i.y
q.erase(make_pair(dist[i.y], i.y)); // 插入现在
}
}
return dist[e];
}


